Proximal Policy Optimization(PPO)
llama-v2昨日开源,看论文的过程中发现自己遗忘了PPO算法。赶紧回顾了Hongyi Li的视频,现在趁还有记忆推导一下。
Policy gradient推导
PPO算法的本质还是训练一个Policy model,来模拟actor根据当前状态进行决策的过程。接下来我们来推导求得训练的损失函数。
首先,切莫忘记强化学习有3个基本元素:Actor,Environment,Reward。假设我们现在正在玩一局游戏,那么当我们结束游戏蓦然回首,可以得到下面这张图:
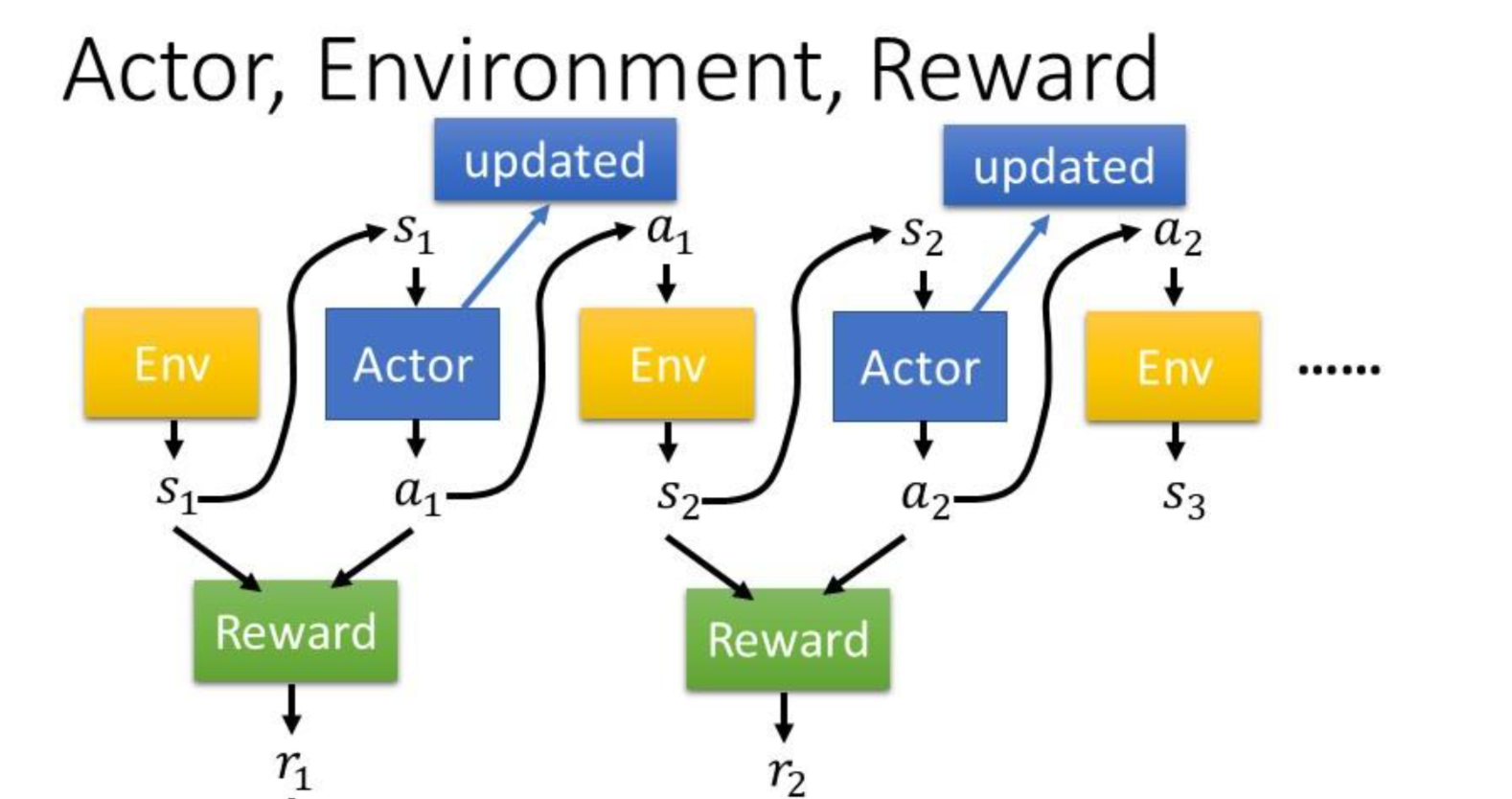
其中我们可以得到一个序列(Trajectory):$\tau = {s_1,a_1,s_2,a_2,…,s_T,a_T }$,易知该序列记录了你在玩游戏时遇到的环境$s_i$及你采取的动作$a_i$。
现在,我们假设进行动作决策的Policy model是$\pi_{\theta}$,这是一个deep network。我们可以轻易算得这个序列出现的概率:
可以看出,这个序列(这轮游戏)的概率,受环境(决定各个状态出现的概率)和policy model的影响。同时,我们记录这个序列的总体回报,即Reward:
其中$r$是采取每一个action后获得的回报,我们对其求和获得总回报。
现在,我们希望学习一个policy model,使其可以让平均回报,或者说回报的期望达到最大,这样对于任意的一局游戏,我们都会倾向于获得更多回报。即
现在,我们以上式作为目标函数,则其偏导(关于模型参数)为
其中,我们可以采样N次序列(理解为N局游戏)来近似偏导的期望,并采用梯度更新来更新模型:
$\theta \leftarrow \theta + \eta \nabla \overline{R}\theta$
. 这里值得注意的是,更新了参数之后,policy model $\pi{\theta}$ 会发生变化,需重新采样而不能再使用原来的数据。
最后,如果考虑$R(\tau)$是权重,那么给这个序列的每一个状态-动作对$(s_i,a_i)$相同的权重是不合适的,因为并不是所有状态-动作对都与这个最终结果,即$R(\tau)$呈正相关。最终,我们假设每个状态动作对的权重只与从该状态-动作对开始的总reward为权重,并辅以一个时间衰减参数$\gamma<1$,得到最终的偏导:
off-policy
我们发现,由于我们不断的更新模型参数,导致数据只能使用一遍。但如果我们采用off-policy策略,即用于训练更新的模型和用于在环境中交互的模型不是同一个,那么数据就可以重复利用了。
那么我们现在只有关于交互模型$q$的采样数据,如何去估计需要训练的这个模型$p$的期望呢?我们引入Importance Sampling,即
应用到policy gradient,公式(5)可以改写为
那么我们的损失函数可设为
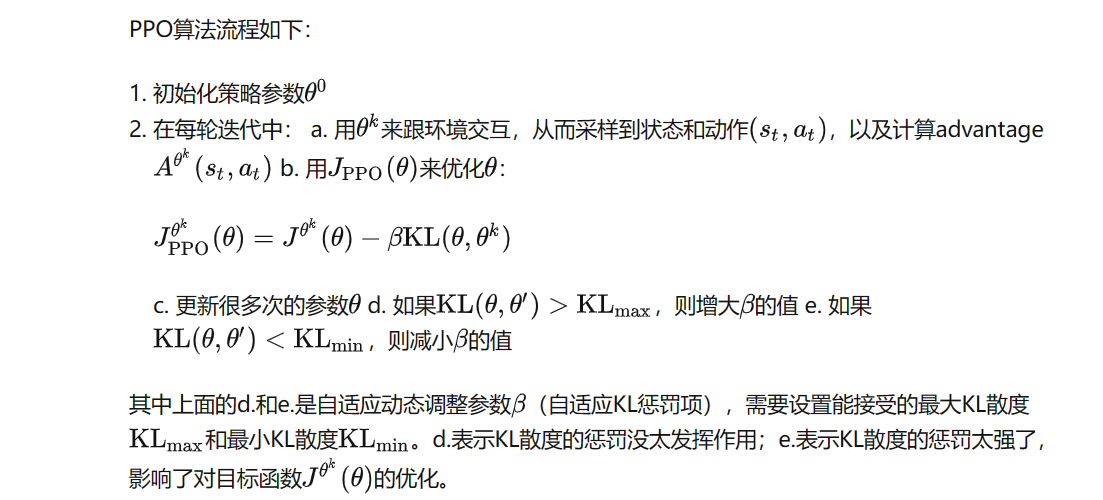
最后的最后,需要注意Importance Sampling中2个分布p和q差异不能太大(为什么?),因此引入一个KL散度来控制两个分布的相似性,故PPO算法的损失为